Amigas, Amigos, el quelonio volador migró de plataforma, ya que en blogger no se puede arregla. www.elqueloniovolador.science los llevará a la nueva plataforma Todos los días repetiré hasta terminar las 9.400 entradas de esta mas lo nuevo. Espero les guste la nueva plantilla. La diferencia es el punto después de las www Rogelio Julio Dillon El Quelonio Volador

Curiosidad de la NASA Mars Rover realizó una prueba el 17 de octubre de 2017, como parte del desarrollo del equipo de Rover de una nueva forma de usar el taladro del Rover. Esta imagen de la cámara de evasión de riesgos frente a la curiosidad (Hazcam) muestra la broca del taladro tocando el suelo durante una evaluación de las mediciones por un sensor en el brazo robótico del Rover.
Curiosidad utilizó su taladro para adquirir el material de la muestra de las rocas marcianas 15 veces de 2013 a 2016. En diciembre de 2016, el mecanismo de alimentación del taladro dejó de funcionar confiablemente. Durante la prueba mostrada en esta imagen, el Rover tocó la broca al suelo por primera vez en 10 meses. La imagen se ha ajustado para iluminar las áreas sombreadas para que la broca sea más evidente. La fecha fue el 1, 848th día marciano, o sol, de Curiosidad de trabajo en Marte.
En el uso del taladro antes de diciembre de 2016, dos postes del contacto--los estabilizadores en cada lado de la broca--fueron colocados en la roca del blanco mientras que la broca estaba en una posición retirada. Entonces el mecanismo motorizado de la alimentación dentro del taladro amplió el pedacito adelante, y las acciones de la rotación y de la percusión de la barrena penetraron la roca.
Una alternativa prometedora ahora bajo desarrollo y pruebas--llamada perforación extendida de la alimentación--utiliza el movimiento del brazo robótico para avanzar directamente el pedacito extendido en una roca. En esta imagen, la broca está tocando el suelo, pero los estabilizadores no lo están. Compárelo con el posicionamiento de los estabilizadores sobre el suelo en una imagen 2013 de la técnica utilizada antes del 2016 de diciembre.
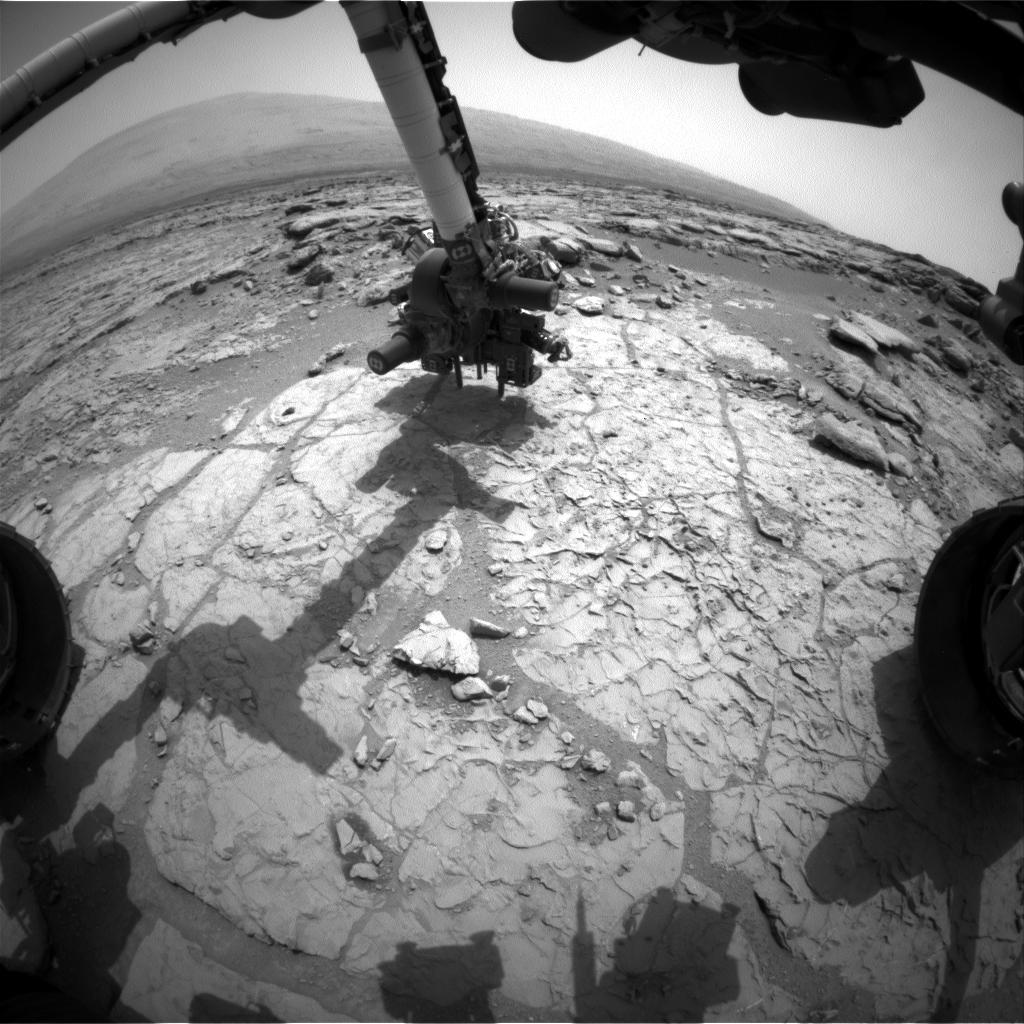
Image Credit: NASA/JPL-Caltech
Image Addition Date:2013-01-28
Image Addition Date:
En la actividad de sol 1848, Curiosidad presionó la broca hacia abajo, y luego aplicó fuerzas laterales más pequeñas mientras tomaba medidas con un sensor de fuerza/torsión en el brazo. El objetivo era obtener comprensión acerca de cómo las lecturas del sensor se pueden utilizar durante la perforación para adaptarse a cualquier presión lateral que podría correr el riesgo de que la broca se atascara en una roca.
Mientras que los ingenieros de Rover-Team están trabajando en un método alternativo de la perforación, la misión continúa examinando sitios en sostenido del montaje, Marte, con otras herramientas.
El Laboratorio de Propulsión Jet de la NASA, una división del Instituto de Tecnología de California, Pasadena, administra el proyecto de Laboratorio Científico de Marte para la dirección de la Misión Científica de la NASA, Washington. JPL diseñó y construyó el rover Curiosity del proyecto y el Rover ' s Hazcams.
Image credit: NASA/JPL-Caltech
Traducción: El Quelonio Volador
Comentarios
Publicar un comentario
Si dejas tu comentario lo contestaré lo más rapido que pueda. Abrazo Rogelio